半導体用語集
ACサーボモータ
英語表記:AC servo motor
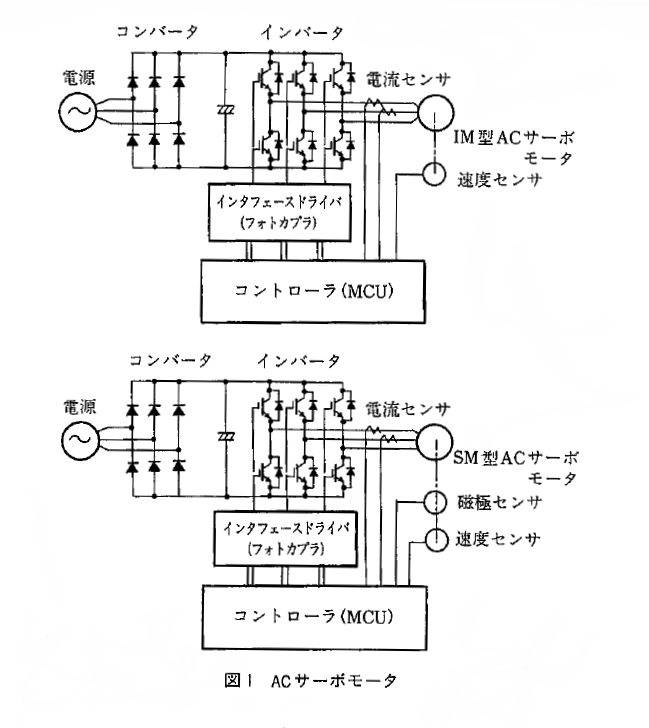
交流モータのうち、サーボモータとして必要な特性(「サーボモータ」の項参照)を備えているモータをACサーボモータ(図1)と呼ぶが、一般の交流モータとの差に明確な定義づけはなされていない。
また、モータ単体をサーボモータと呼称することはもちろんであるが、通常モータとサーボドライバを合わせてサーボモータと呼称することも多い。サーボドライバとともに動作させることにより、サーボモータとして必要な特性をえることによるものと考えられる。
ACサーボモータには、IM型ACサーボモータとSM型ACサーボモータの2種類があり、モータとして前者は誘導型モータ(induction motor)が、後者は同期型モータ(synchronous motor)が利用されている。
交流モータの回転数を変えるには、駆動電源の周波数を変える必要があるが、この可変周波数電源をバイポーラトランジスタ、IGBTあるいはパワーMOSFETなどをドライブ素子として利用したインバータを利用するのが一般的である。
前述のようにモータを制御するため、モータにサーボドライバを備えなければならない。サーボドライバは出力駆動回路にモータ駆動用のインバータを有し、モータの回転数(速度)、位置および電流(トルク)を検出し、これをフィードバックして出力インバータヘの制御信号を発生させて、モータの回転数、位置およびトルクを制御する制御回路を持っている。
そのため、制御回路にはマイコンやDSPが利用されているが、IM型ACサーボモータにおいて、ベクトル制御など高精度駆動法の開発が進み、モー夕単体の開発もさることながら、半導体、特にDSPやハイエンドマイクロプロセッサの利用を前提とした駆動法の開発にも力が注がれている。
また、SM型ACサーボモータは、構造的にロータ(回転子)に永久磁石を利用しており(インナロータ型)、磁石の剥離強度以上の回転数に上げられないため、構造的に簡単なIM型が高速回転や大電力化には向いている。
なお、SM型ACサーボモータにおいて、駆動されるモータは構造的には交流モータであっても、駆動電源に直流電源を利用し、三相全波方式の出力駆動ドライバ部のベース(あるいはゲート)駆動を可変周波数のPWM信号で制御する場合、これをDCブラシレスモータと呼ぶことがある。
関連製品
「ACサーボモータ」に関連する製品が存在しません。キーワード検索
フリーワードやカテゴリーを指定して検索できます
関連用語
関連特集
会員登録すると会員限定の特集コンテンツにもアクセスできます。